�V�����I(y��)�I(y��)���g(sh��)�W(xu��)Ժ�˹����܌�(sh��)Ӗ(x��n)�Һ���
2024-05-09 21:07����(sh��)Ӗ(x��n)�Һ�����
�V�����I(y��)�I(y��)���g(sh��)�W(xu��)Ժ�����Ϣ�W(xu��)Ժ�˹����ܾC�ό�(sh��)Ӗ(x��n)��λ��У�@���Ľ̌W(xu��)�^(q��)�ľ���B��203���g���܇��O(sh��)�б�ݵĽ�ͨ�Ͷ�ܵČW(xu��)��(x��)���g����(sh��)Ӗ(x��n)��ռ��80ƽ���ף����g�O(sh��)Ӌ(j��)��ֿ��]�˽̌W(xu��)�c��(sh��)�`����Ҫ�����ֺ�������(d��ng)�������������60��(g��)��(d��)���Ĺ�λ����ÿλ�W(xu��)���ṩ�˳���Č�(sh��)�ٿ��g�͂�(g��)�ˌW(xu��)��(x��)�I(l��ng)�ء�
��(sh��)Ӗ(x��n)�҃�(n��i)���O(sh��)�����M(j��n)���������2�_(t��i)�߶˙C(j��)���ˣ������ṩ�͑�����(w��)������ʾ�ķ���(w��)�C(j��)���˺�֧�ָ�(j��)�Z���R(sh��)�e��푑�(y��ng)Ӗ(x��n)�����Z���C(j��)���ˣ��@Щ�C(j��)���˲��H������ʾ�ͽ̌W(xu��)��Ҳ�njW(xu��)���о��͌�(sh��)�(y��n)����Ҫ���ߡ����⣬߀����16���˹����ܽ̌W(xu��)��(sh��)�(y��n)�䣬���а����˂���������(zh��)������̎������һϵ��ģ�K�����ڌW(xu��)����ģ�M��h(hu��n)�����_չ�C(j��)���W(xu��)��(x��)����ȌW(xu��)��(x��)ģ�͵Ę�(g��u)���cӖ(x��n)����






�@Щ�O(sh��)����Ҫ����֧�֙C(j��)���W(xu��)��(x��)����ȌW(xu��)��(x��)ģ��Ӗ(x��n)������(sh��)��(j��)�����Ƚ̌W(xu��)���о����(d��ng)�����������W(xu��)���Č�(sh��)�H�������������̌�(sh��)�`��(j��ng)�(y��n)�Ϳ���ˮƽ��������Ҫ�Ƅ�(d��ng)���á���(sh��)Ӗ(x��n)�ҵ��Y�a(ch��n)��ֵ�_(d��)120�fԪ���������Ϣ�W(xu��)Ժ�y(t��ng)һ��������ָ�����Y��̎���(d��n)�Ό��I(y��)ؓ(f��)؟(z��)�ˣ����Hؓ(f��)؟(z��)�ճ��ľS�o(h��)����������߀���ڌ���(sh��)Ӗ(x��n)���O(sh��)���M(j��n)������(j��)�;S�o(h��)�����C�O(sh��)������M(j��n)�Ժ��ܵ������ԣ��_����(sh��)Ӗ(x��n)���܉��m��(y��ng)���µĽ̌W(xu��)����ͼ��g(sh��)�l(f��)չ���Ķ����όW(xu��)���ڿƌW(xu��)�о��ͼ������B(y��ng)�ϵ���ȌW(xu��)��(x��)�w�(y��n)��ʹ������δ���Ĺ�����ռ��(j��)��(y��u)�ݡ�
��(sh��)Ӗ(x��n)�Ҳ��H�ǽ̌W(xu��)���(d��ng)�Ĉ�����Ҳ�njW(xu��)���_չ��(chu��ng)��(sh��)�(y��n)�Ϳ����(xi��ng)Ŀ����Ҫ���أ���γГ�(d��n)��У��(n��i)��ļ��g(sh��)��ِ�̈́�(chu��ng)�´�ِ��ͨ�^�ڌ�(sh��)Ӗ(x��n)���еČW(xu��)��(x��)�͌�(sh��)�`���W(xu��)���܉�e���S���Č�(sh��)�H�(xi��ng)Ŀ��(j��ng)�(y��n)���錢�������I(y��)���Ĵ���(ji��n)��(sh��)�Ļ��A(ch��)��
����(sh��)Ӗ(x��n)�ҹ�����
�˹����ܾC�ό�(sh��)Ӗ(x��n)�Ҳ��H�njW(xu��)�����@ȡ֪�R(sh��)�Ĉ��������nj�(sh��)�`���ܡ��_չ���к��M(j��n)�Є�(chu��ng)�µ���Ҫƽ�_(t��i)������(sh��)Ӗ(x��n)�ҵĹ��ܶ�Ԫ��ּ�ڞ�W(xu��)���ṩȫ��λ�ČW(xu��)��(x��)�w�(y��n)�͌��I(y��)�������B(y��ng)�C(j��)��(hu��)��
�̌W(xu��)�n�̌�(sh��)�`: ��(sh��)Ӗ(x��n)��֧���˹����ܻ��A(ch��)����(sh��)��(j��)�Y(ji��)��(g��u)���C(j��)���W(xu��)��(x��)����ȌW(xu��)��(x��)�����ܿ��ơ��D��̎���ȶ��T�����n�̵Č�(sh��)�H�����c��(sh��)�(y��n)���(d��ng)���W(xu��)���ڴ˿����(y��n)�C��Փ֪�R(sh��)��ͨ�^�(xi��ng)Ŀ��(sh��)ʩ��������I(y��)֪�R(sh��)������Ͱ��ա�
���I(y��)������Ӗ(x��n): ������ߌW(xu��)���Č��I(y��)���|(zh��)����(sh��)Ӗ(x��n)�ҽ�(j��ng)���e�k�����������Ӗ(x��n)��ӑ��(hu��)�����M(j��n)�ИI(y��)��(n��i)�Y����M(j��n)���挦���o��(d��o)���Լ������ИI(y��)څ�ݵķ���ӑՓ��
�����(xi��ng)Ŀ�c�W(xu��)�g(sh��)��ِ: ���ڌ�(sh��)Ӗ(x��n)�ҳ�ɫ�Č�(sh��)�(y��n)�O(sh��)ʩ�ͼ��g(sh��)֧�֣��W(xu��)�����ԅ��c����ˮƽ�Ŀ����(xi��ng)Ŀ�У��c��(d��o)���������P(gu��n)�����Ӈ���(n��i)��ČW(xu��)�g(sh��)��ِ������(zh��n)�����˹������O(sh��)Ӌ(j��)��ِ�������R�����Լ����(chu��ng)��(chu��ng)�I(y��)��ِ��
���I(y��)�J(r��n)�C��ԇ: ����(sh��)Ӗ(x��n)�ҿ������˹��������P(gu��n)�I(y��)�����C������Ӗ(x��n)�Ϳ�ԇ������1+X��HCIP/HCIE�J(r��n)�C��ԇ�ȣ������W(xu��)�������I(y��)��������
���Y��Ӗ(x��n)�ͽ̸Č�(sh��)�`: �̎�Ҳ�����Ì�(sh��)Ӗ(x��n)���M(j��n)�н̌W(xu��)�������о��c̽�����Լ��½̌W(xu��)���ߺͼ��g(sh��)�ćLԇ����(sh��)Ӗ(x��n)�ҽ�(j��ng)���Г�(d��n)�̌W(xu��)�ĸ�ԇ�c(di��n)�(xi��ng)Ŀ���Ƅ�(d��ng)�����̌W(xu��)�Ą�(chu��ng)�°l(f��)չ��
ͨ�^�@Щ�S���Ĺ��ܣ���(sh��)Ӗ(x��n)�Ҟ������Ϣ�W(xu��)Ժ���������|(zh��)�����g(sh��)������˹����ܑ�(y��ng)�ü��g(sh��)�˲��ṩ���������ϣ�ͬ�r(sh��)Ҳ�ӏ�(qi��ng)�ˌW(xu��)Ժ�c�ИI(y��)֮�g�Ľ����c����������ˌW(xu��)���ľ͘I(y��)��������δ���l(f��)չ?ji��)����?/span>
��Դ�ڣ� �V�����I(y��)�I(y��)���g(sh��)�W(xu��)Ժ�����Ϣ�W(xu��)Ժ
���P(gu��n)�a(ch��n)Ʒ��

AI�˹����܌�(sh��)�(y��n)�����_������AI�W(xu��)��(x��)֮�ã�
2017�꣬Transformer���F(xi��n)��һƪՓ�ġ� Attention Is All You Need���б����룬������Ȼ�Z��̎���еõ��V����(y��ng)�á�
2022�꣺ChatGPT�ęM�ճ���
2022��11�£�OpenAI�l(f��)���˻���Transformerģ�͵Ĵ����Z��ģ��ChatGPT�����l(f��)��ȫ�����AI�˳��������������s־�u(p��ng)��“���ͻ��”�����Q��“���ܕ�(hu��)��׃�҂���������ʽ��˼����ʽ�Լ����(chu��ng)�������������x���뷨”��
2023�꣺AIԪ�꣬ȫ���٣��ݲ��ɓ���
�Ї�������(w��)Ժ�l(f��)������һ���˹����ܰl(f��)չҎ(gu��)���������˹������О���ґ�(zh��n)�ԣ�Ŀ��(bi��o)��2030��ɞ������I(l��ng)���ߡ�
�������l(f��)�����˹����܇��ґ�(zh��n)�ԡ������m(x��)�Ӵ�Ͷ�룬�����I(l��ng)�ȃ�(y��u)�ݡ�
�W�ˣ��l(f��)�����˹����ܰ�Ƥ���������˹�����ҕ��W��δ����(j��ng)��(j��)���L���档
ȫ���˹��������t(y��)�������g(sh��)����������ͨ�����ڡ��ʘ����I(l��ng)��V����(y��ng)�ã�����ǰ��δ�е�׃�
AI ���r(sh��)���ѽ�(j��ng)���R�����㣬��(zh��n)����ˆ
AI�˹����܌�(sh��)�(y��n)�䌣���У�˹����ܽ̌W(xu��)�����ȫ����ƽ�_(t��i)�����p������AI���g(sh��)���_�����ܕr(sh��)���Ĵ��T��
������ă�(y��u)�ݣ�����һ·�I(l��ng)�ȣ�
1. �ɜ\���ѭ��u�M(j��n)
�Ļ��A(ch��)��GPIO�U(ku��)չ����ȌW(xu��)��(x��)��AIҕ�X��AI �X���Ϻ�픰�A(y��)Iƽ�_(t��i)�ṩ�����ČW(xu��)��(x��)·������һ��������AI֪�R(sh��)�wϵ���p�ɑ�(y��ng)�����N����(zh��n)��
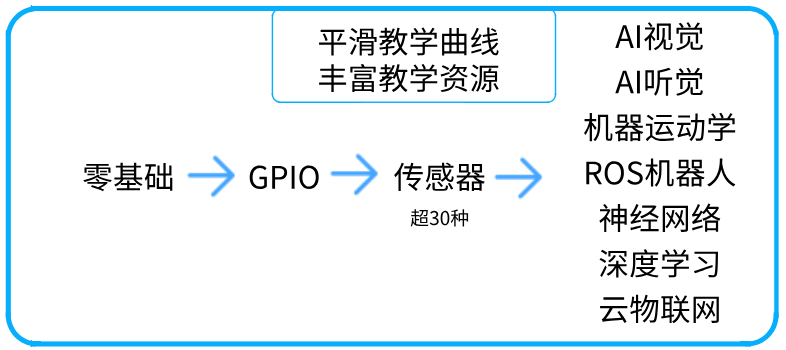
AI�˹����܌�(sh��)�(y��n)�䌢��Փ�c��(sh��)�`�����Y(ji��)�ϣ��S���Č�(sh��)�(y��n)�(xi��ng)Ŀ���ڌ�(sh��)�`�ЌW(xu��)��(x��)���ڑ�(y��ng)����얹̣�������AI֪�R(sh��)�ڕ�(hu��)؞ͨ��

3. �_���`����l(f��)��(chu��ng)��
�_�ŵ�GPIO�ӿں�ģ�K���O(sh��)Ӌ(j��)��֧�ւ�(g��)�Ի������_�l(f��)��������(chu��ng)��׃?y��u)�F(xi��n)��(sh��)����������Լ���AI�(xi��ng)Ŀ��
�����u(p��ng)�r(ji��)��
1. ���Ը�У�̎����u(p��ng)�r(ji��)��
“�n�̃�(n��i)���S�����̌W(xu��)Ч���ܸܵģ��W(xu��)�����������W(xu��)AI��”
“��ǰ��AI�����^�����ˣ����N��Փ֪�R(sh��)���W(xu��)���� �������F��F(xi��n)�������Ϻ�픰�A(y��)I��(sh��)�(y��n)�䣬���p�ɶ��ˣ�ֱ���W(xu��)������(sh��)�(y��n)���W(xu��)���\�죡”
2. ���ԌW(xu��)�����u(p��ng)�r(ji��)��
“��ǰ�Ҍ�AIһ�c(di��n)���������F(xi��n)���Ҷ����_�l(f��)�Լ���AI�(xi��ng)Ŀ�ˣ�”
“�n���ɜ\���ѭ��u�M(j��n)��С��Ҳ���p�����֡��ώ��v��Ҳ�ã��� �ö����W(xu��)�Õ�(hu��)��”
3. �����I(l��ng)��(d��o)���u(p��ng)�r(ji��)
“AI�˹����܌�(sh��)�(y��n)���܉�����W(xu��)����������AI֪�R(sh��)�ͼ��ܡ�ƽ�_(t��i)�ṩ�Č�(sh��)�(y��n)�(xi��ng)ĿҲ�dz���(sh��)�ã��܉�����W(xu��)������Փ֪�R(sh��)��(y��ng)�õ���(sh��)�`�С�”
“�҂����ţ������Ϻ�픰��˹����܌�(sh��)�(y��n)�䣬�҂��W(xu��)У��AI�̌W(xu��)ˮƽ�������������W(xu��)����Ҳ���܉���δ����AI�r(sh��)��ȡ�ø���ijɾ͡�”
AI�˹����܌�(sh��)�(y��n)�䲻�H�njW(xu��)��(x��)AI����ѹ��ߣ�������ͨ��AIδ���Ę�����
һ��AI����

GPU ��128�� NVIDIA Maxwell GPU
CPU ��4��cortex-A57̎����
��(n��i)�棺4 GB LPDDR 25.6 GB/s
������472 GFLOP
����NVIDIA��(qi��ng)���AlӋ(j��)��������ϵ�y(t��ng)��(n��i)����һ��(g��)С�Ʌs����(qi��ng)���Ӌ(j��)��C(j��)���������㲢���\(y��n)�ж���(g��)��(j��ng)�W(w��ng)�j(lu��)������z�y���ָ���Z��̎���ȑ�(y��ng)�ó��� ϵ�y(t��ng)���d�ĺ�cortex- A57̎������128��Maxwell GPU�� 4GB LPDDR��(n��i)�棬��������AlӋ(j��)���������ṩ472GFLOP��������֧��һϵ�����е�Al��ܺ��㷨������TensorFlow��Pytorch�� caffe/caffe2��Keras��MXNET�ȡ�
����ϵ�y(t��ng)����cAI���
1. ϵ�y(t��ng)�A(y��)�bubuntu18.04����ϵ�y(t��ng)�����Эh(hu��n)�����a���ļ����Ѱ��b���_�C(j��)���á�
Ubuntu 18.04 LTS����Ӌ(j��)���I(l��ng)��Ч�ʘO�ߣ��e�m���ڙC(j��)���W(xu��)��(x��)�@�ӵĴ惦(ch��)�ܼ��ͺ�Ӌ(j��)���ܼ����΄�(w��)��Ubuntun �L��֧�ְ汾���ԫ@�� Canonical �ٷ��L�_(d��)����ļ��g(sh��)֧�֡�Ubuntu 18.04 LTS ߀�������� Linux Kernel 4.15�����а���ᘌ� Spectre �� Meltdown �e(cu��)�`���ޏ�(f��)����

2. �ṩԔ��(x��)��python�_Դ��������
����(j��)TIOBE�������� ��Python�ѳ�ԽC#���cJava,C,C++һ��ɞ�ȫ��ǰ4���������Z�ԡ�����(n��i)Ŀǰ�ٶ�ָ��(sh��)�������ѽ�(j��ng)��ԽJava���cC++�������ɞ����(n��i)���ܚgӭ���_�l(f��)�Z�ԡ�
Python���V����(y��ng)���ں���_�l(f��)���Α��_�l(f��)���W(w��ng)վ�_�l(f��)���ƌW(xu��)�\(y��n)�㡢��(sh��)��(j��)��������Ӌ(j��)�㣬�D���_�l(f��)���I(l��ng)��Python��ܛ���|(zh��)�����ơ������_�l(f��)Ч�ʡ�����ֲ�ԡ��M�����ɡ��S����֧�ֵȸ���(g��)�����̎�����M(j��n)��λ��python���� ���Ρ��W(xu��)�����M(f��i)���_Դ������ֲ���ɔU(ku��)չ����Ƕ�롢����?q��)���ȃ?y��u)�c(di��n)����������?q��)���������java��C#.net���صף�

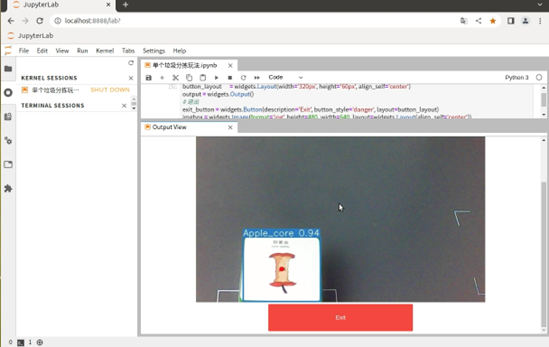
3. JupyterLab����
JupyterLab��һ��(g��)����Web�Ľ���ʽ�_�l(f��)�h(hu��n)��������Jupyter�Pӛ�������a�Pӛ�������a�͔�(sh��)��(j��).JupyterLab�dz��`�����ú������Ñ����棬��֧��?j��n)?sh��)��(j��)�ƌW(xu��)���ƌW(xu��)Ӌ(j��)��͙C(j��)���W(xu��)��(x��)�ЏV���Ĺ�����.JupyterLab�ǿɔU(ku��)չ�ĺ�ģ�K���ľ�������������½M�����c�F(xi��n)�нM������


4. ��NAI���
OpenCVӋ(j��)��C(j��)ҕ�X�죬TensorFlow AI��ܣ�Pytorch AI��ܵ�

����AI�˹����܌�(sh��)�(y��n)�����c(di��n)
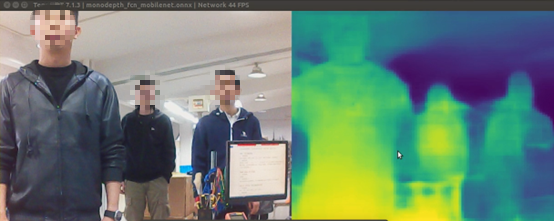
֧�ֶ�ģ�B(t��i)ݔ�룬���Z�Ծ��̣���(y��u)����ȌW(xu��)��(x��)ģ��
���w�ˑB(t��i)��Ӌ(j��)����(y��ng)���ڌ�(sh��)�H����
��(sh��)�r(sh��)�����Ƴ���������ȌW(xu��)��(x��)����Ч��(sh��)�r(sh��)�Ƴ�����
Ŀ��(bi��o)�z�y����Ŀ��(bi��o)�z�y������(qi��ng)
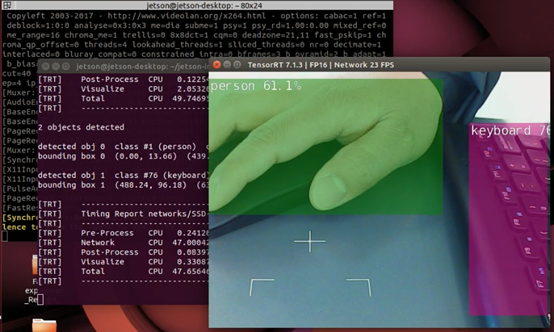
�Z�x�ָ���ؼ�(j��)�e��Ԕ��(x��)����m���ڭh(hu��n)����֪
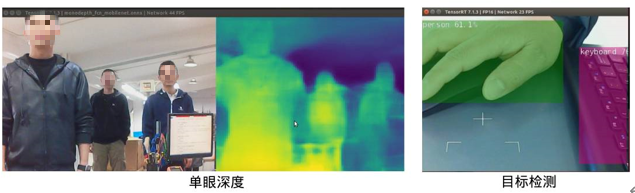
��Ŀ��ȣ��o���������C(j��)������ȫ���e�W(w��ng)�j(lu��)���ɏĆ�(g��)�D���Ɣ�������ȣ���(y��ng)�ÏV����
�Z������R(sh��)�e������Mobilenet_v2ģ��̎���Z����У��p��������Ч
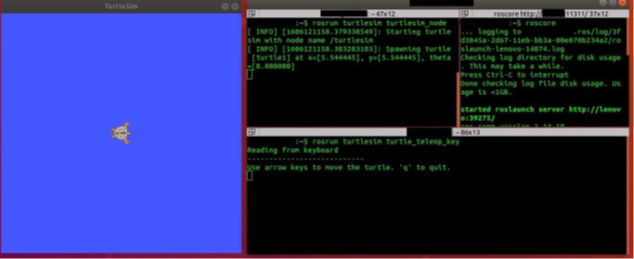
�����ɶșC(j��)е�ۣ����ܶ�C(j��)��ROS���ƣ��m����AIҕ�X�ɫ�֒���(sh��)�(y��n)
܇���R(sh��)�e��ʹ��Teseract-OCR ���棬�R(sh��)�e��(zh��n)�_�ʸߣ�ʹ�È����V����

ROS�C(j��)����ϵ�y(t��ng)����ƽ�_(t��i)���ݣ����a�_Դ��ģ�K���O(sh��)Ӌ(j��)��ͨ���ԏ�(qi��ng)�`���Ըߡ�
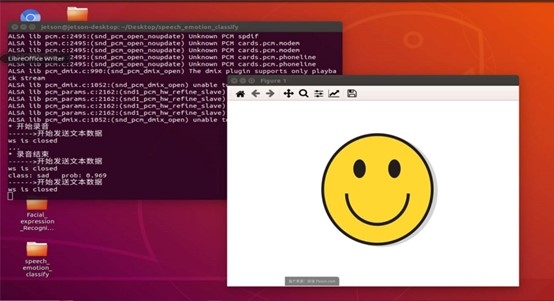
AI �X���壬�߂���|(zh��)�����l̎�����Z������(w��)�����dSnowboy�����~�z�y���棬��������Z������R(sh��)�e���D�`�C(j��)���ˡ��Z��Ԓ�Ȍ�(sh��)�(y��n)��

�ġ�Ӳ���YԴ
һ��Ӳ���YԴ
| ���܆�Ԫ | ����(sh��) | �������� |
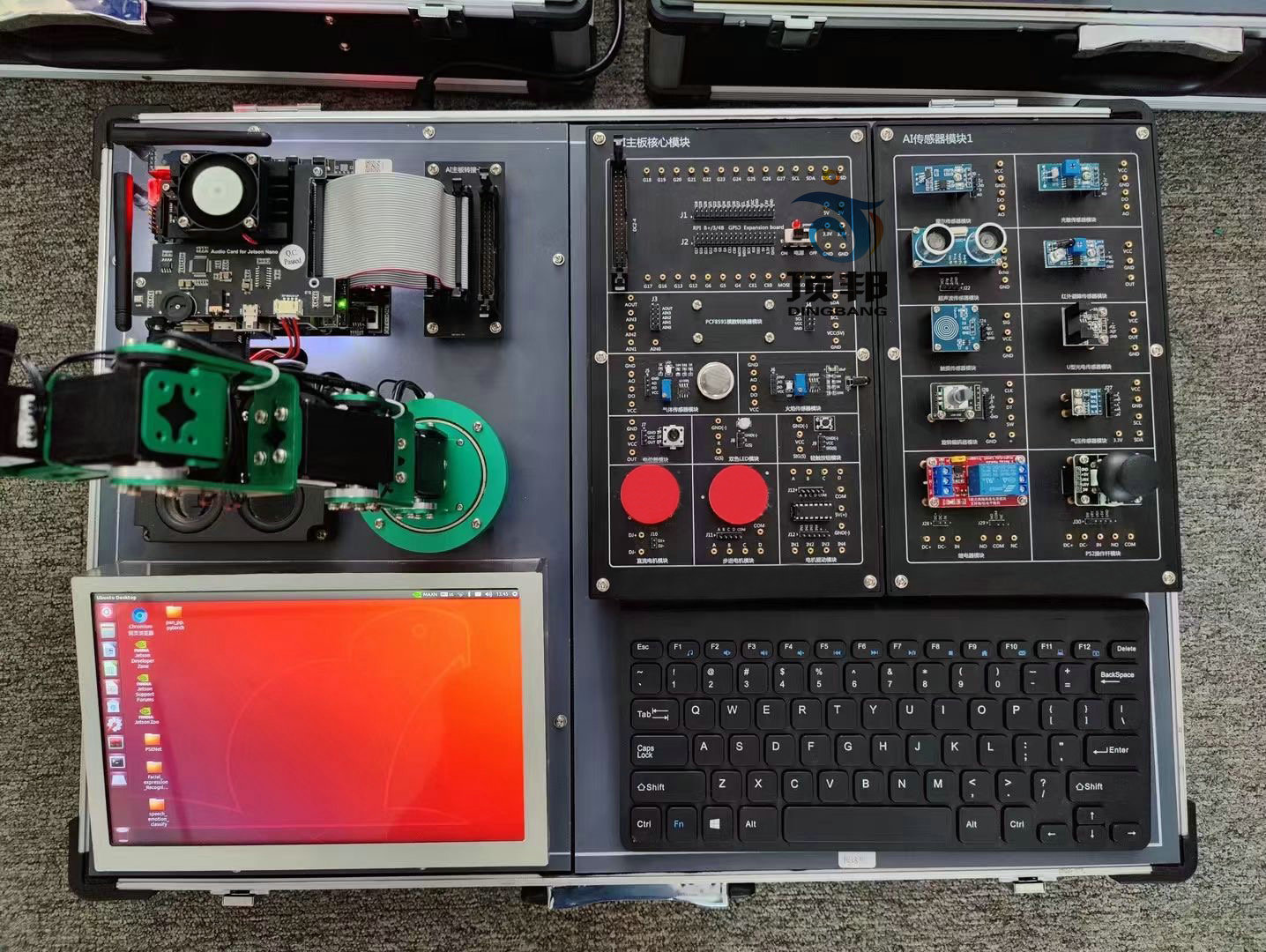
| ��(sh��)�(y��n)�� | ���γߴ磺≥610*440*240mm�� | ��������Xľ�Ͻ���ϣ����ܰ��b�������o(h��)�|����(sh��)�(y��n)���w��(n��i)�������惦(ch��)���g���������ƴ��ģ�K����������_��ʽ�鰴�������� |
| AI�\(y��n)���Ԫ |
GPU ��128�� NVIDIA Maxwell GPU�� CPU ��4��cortex-A57̎������ ��(n��i)�棺4 GB LPDDR 25.6 GB/s�� ������472 GFLOP�� ���ĔU(ku��)չ����������4��(g��)USB3.0�ӿڣ�֧��HDMI��DPҕ�l�ӿڣ�һ·M.2�ӿڵĆ�·PCIE�������b��ɢ���L(f��ng)�ȣ� 40pin GPIO�� �W(w��ng)�j(lu��)��ǧ����̫�W(w��ng)�ڡ��o���W(w��ng)��֧��2.4Ghz/5GHZ,֧���{(l��n)��4.2�� |
���bUbuntu 18.04 LTS+ROS Melodic����ϵ�y(t��ng)������JupyterLab�_�l(f��)�h(hu��n)����Anaconda 4.5.4̓�M�h(hu��n)����֧��һϵ�����е�AI��ܺ��㷨������TensorFlow��caffe/caffe2��Keras��Pytorch��MXNET �ȣ�ϵ�y(t��ng)���b��OpenCVӋ(j��)��C(j��)ҕ�X�죬TensorFlow AI��ܣ�Pytorch AI��ܡ� |
| �C(j��)� |
�C(j��)е�����ɶȣ�5���ɶ�+�A������200g��Чؓ(f��)�d����չ350mm�� ��C(j��)������15Kg*5+6Kg*1���ܴ��п�����C(j��)�� ���|(zh��)��ꖘO����̎���X�Ͻ� |
���ڙC(j��)�����\(y��n)��(d��ng)�W(xu��)�c�C(j��)����ϵ�y(t��ng)��������ɊA�ַeľ�Ȅ�(d��ng)���� |
| Ƕ��ʽ�������� |
�ӿڣ�6��(g��)������C(j��)�ӿڣ� PWM��C(j��)�ӿڣ�i2C�ӿڣ���AI���İ���߀֧��STM32��Raspberry Pi�� OLED:�@ʾCPUռ�ã��@ʾ��(n��i)��ռ�ã��@ʾIP��ַ�Ȼ��A(ch��)��Ϣ�� ���I��K1+K2�I+RESET�I�� 1 ��(g��)RGB���� |
����֧�֙C(j��)е�ۄ�(d��ng)���� |
| �z���^ | ����USB�ӿڣ�30�f���أ�110�ȏV�ǔz���^��480P�ֱ��ʣ�600*480�� | AIҕ�X��(sh��)�(y��n)���������֒��Ȍ�(sh��)�(y��n)�� |
| AI �X��Ԫ |
���lоƬ������SSS1629���lоƬ�� �����L(f��ng)�����d�ɂ�(g��)���|(zh��)��MEMS�������L(f��ng)�� �ӿڣ���(bi��o)��(zh��n)3.5mm���C(j��)�ӿڡ��pͨ�����Ƚӿڣ� |
����USB�ӿ��O(sh��)Ӌ(j��)�����(q��)��(d��ng)����ϵ�y(t��ng)���ݣ�����������������|(zh��)���ӡ��������AI �X�(sh��)�(y��n)�� |
| ��������(sh��)�(y��n)?z��i)��K |
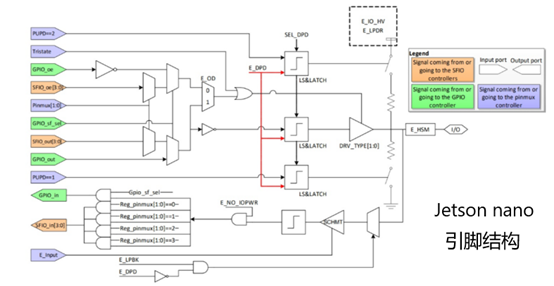
��������(sh��)�(y��n)?z��i)��K��Jetson nano��GPIO�ӿ��������������GPIO��(sh��)�(y��n)�����Ұ�������(sh��)�(y��n)�n�̣��pɫLED�� �^����� �p�|�_�P(gu��n)���I��U ��늂�������ģ��(sh��)�D(zhu��n)�Q��PS2 �ٿv�U���λ����ģ�M����������������������������(b��o)�������w���������|���_�P(gu��n)���������������x�z�y�����D(zhu��n)���a�����t����ς��������≺�����������݃x���ٶȂ�������ѭ�E��������ֱ��늙C(j��)�L(f��ng)��ģ�K�����M(j��n)늙C(j��)�(q��)��(d��ng)ģ�K�� |
��������(sh��)�(y��n)?z��i)��K���Ը��õĎ����W(xu��)��(x��)�߸��ӿ��ٵ����TJetson nano��GPIO���ƣ��Ļ��A(ch��)���֣���Ɍ�(sh��)�(y��n)�(xi��ng)Ŀ��ͬ�r(sh��)������GPIO�Ϳ��Ƅ�(d��ng)��ģ�KҲʹ�҂����m(x��)��ʹ�ú��_�l(f��)���ӷ��㡣 |
| �@ʾ�� | 10���@ʾ����HDMI�ӿڣ�1080P�ֱ��ʡ� | �@ʾ���Aб���b���Aб�Ƕȴ���5°�����ڲ���ϵ�y(t��ng)�@ʾ�� |
| �I�P���(bi��o) | ��늳ع�늣��o���{(l��n)���B�ӡ� | ����ϵ�y(t��ng)���ơ� |
�塢AI�˹������n��
AI�˹����܌�(sh��)�(y��n)�����O(sh��)Ӌ(j��)�r(sh��)�����]����ͬ���A(ch��)�W(xu��)��(x��)�ߵ���������ʹ�ø�������ČW(xu��)��(x��)��ʽ���f����Ԕ��(x��)��֪�R(sh��)������(sh��)�(y��n)ƽ�_(t��i)�����ʹ���߾���һ���ČW(xu��)��(x��)�������e������У��W(xu��)�����о������܉�����W(xu��)���ij��W(xu��)��u�^�ɵ�����W(xu��)��(x��)��Ҳ���Ԏ���������ɮ��I(y��)�O(sh��)Ӌ(j��)���ߌW(xu��)�g(sh��)Փ�ġ����˹����ܱ���_���Ľ��죬�˹������� ����(g��)�I(l��ng)�l(f��)�]����Ҫ�����ã���a(ch��n)Ʒ�x���������Q�������I(y��)�����˹��������ѝB��Ӌ(j��) ��C(j��)ҕ�X���Ԅ�(d��ng)�{��Ȼ�Z��̎�����C(j��)���˼��g(sh��)�����]ϵ�y(t��ng)���Z���R(sh��)�e�����պ���ȵ��I(l��ng)��
AI�˹����܌�(sh��)�(y��n)��ČW(xu��)��(x��)��Ҫ�֞�ɂ�(g��)���֣���һ���֞��˹����ܻ��A(ch��)����Ҫ���������P(gu��n)��(sh��)�W(xu��)���A(ch��)�����̻��A(ch��)���C(j��)���W(xu��)��(x��)�������(j��ng)�W(w��ng)�j(lu��)��ROS���A(ch��)�c�\(y��n)��(d��ng)�W(xu��)���ڶ�������Ҫ�錍(sh��)�`�W(xu��)��(x��)������GPIO�c���������C(j��)е�ۡ�AIҕ�X��AI �X����(li��n)�W(w��ng)����ɌW(xu��)��(x��)���Գ���˽�˹����������������P(gu��n)��(y��ng)�á�

1.���P(gu��n)��(sh��)�W(xu��)���A(ch��)
| �̌W(xu��)�n�� | �n�̃�(n��i)�� |
| ���Փ | ��(bi��o)������������ꇡ����� |
| ��ꇺ�������� | |
| ��λ��ꇺ����� | |
| �������P(gu��n)�������ӿ��g | |
| ����(sh��) | |
| ������͵ľ�ꇺ����� | |
| �E�\(y��n)�� | |
| Moore-Penrose���� | |
| �����c��ϢՓ | �S�C(j��)׃���c���ʷֲ� |
| �xɢ��׃���c���ʷֲ��� | |
| ��Ҋ���xɢ���ʷֲ� | |
| �B�m(x��)��׃�������ܶȺ���(sh��) | |
| ��Ҋ���B�m(x��)�Ը��ʷֲ� | |
| (li��n)�ϸ��� | |
| ߅������ | |
| �l������ | |
| ��(d��)���Ժ͗l����(d��)���� | |
| ����������ͅf(xi��)���� | |
| ��ϢՓ |
| �̌W(xu��)�n�� | �n�̃�(n��i)�� |
| ׃���c������(sh��)��(j��)��� | ׃�� |
| ������(sh��)��(j��)��� | |
| �б���Ԫ�M | �б� |
| Ԫ�M | |
| �ֵ��c���� | �ֵ� |
| ���� | |
| ͌��� | ����?q��)�����?/span> |
| Ķ��x��ʹ�� | |
| ���� | |
| �^�� | |
| ģ�K�������O(sh��)Ӌ(j��) | ����(sh��)��(chu��ng)�����{(di��o)�� |
| ����(sh��)���f | |
| ��ȌW(xu��)��(x��)��ܺ��� | TensorFlow |
| PyTorch | |
| Caffe/caffe2 | |
| PaddlePaddle | |
| Linux�_�l(f��)�h(hu��n)������ | Ubuntu����ϵ�y(t��ng) |
| ���������� |
| �̌W(xu��)�n�� | �n�̃�(n��i)�� |
| �������� | Ӗ(x��n)�������yԇ�����(y��n)�C�� |
| �^�M�ϡ�Ƿ�M�ϡ����� | |
| �W(xu��)��(x��)�ʡ����t���������(y��n)�C | |
| K-�����㷨 | �������� |
| K���xȡ | |
| ���x�Ķ��� | |
| ֧�������C(j��) | �g���c֧������ |
| ��ż���} | |
| �˺���(sh��) | |
| ܛ�g���c���t�� | |
| K-��ֵ��� | K-��ֵ��� |
| �Q�ߘ���S�C(j��)ɭ�� | �Q�ߘ�Ļ������� |
| �x����ф��֘�(bi��o)��(zh��n) | |
| �S�C(j��)ɭ�� | |
| ��(j��ng)�W(w��ng)�j(lu��) | ��(j��ng)Ԫģ�� |
| ��֪�� | |
| ���Ӹ�֪�� | |
| ��(j��ng)�(y��n)�L(f��ng)�U(xi��n)�ͽY(ji��)��(g��u)�L(f��ng)�U(xi��n) | |
| �ݶ��½��ͷ������ | |
| RBF�W(w��ng)�j(lu��) | |
| ���ތW(xu��)��(x��)�C(j��) | |
| ��(j��ng)�W(w��ng)�j(lu��)Ӗ(x��n)������ |
| �̌W(xu��)�n�� | �n�̃�(n��i)�� |
| �˹����� | �˹����ܡ��C(j��)���W(xu��)��(x��)�c��ȌW(xu��)��(x��) |
| ��ȌW(xu��)��(x��) | ��ȌW(xu��)��(x��)�İl(f��)չ�v�� |
| ���e��(j��ng)�W(w��ng)�j(lu��) | �l(f��)չ�v�� |
| �����Y(ji��)��(g��u) | |
| ǰ���\(y��n)���c������� | |
| ���P(gu��n)���|(zh��) | |
| ���e��(j��ng)�W(w��ng)�j(lu��)׃�N | |
| ���þ��e��(j��ng)�W(w��ng)�j(lu��)ģ�� | |
| ѭ�h(hu��n)��(j��ng)�W(w��ng)�j(lu��) | ѭ�h(hu��n)��(j��ng)�W(w��ng)�j(lu��)���� |
| �L�̕r(sh��)ӛ���W(w��ng)�j(lu��)��(j��ng) | |
| ѭ�h(hu��n)��(j��ng)�W(w��ng)�j(lu��)��׃�w | |
| ���Ɍ����W(w��ng)�j(lu��) | ���Ɍ����W(w��ng)�j(lu��)���� |
| ���Ɍ����W(w��ng)�j(lu��)�����Y(ji��)��(g��u) | |
| ���Ɍ����W(w��ng)�j(lu��)׃�N |
| ��(sh��)�(y��n)�n�� | �n�̃�(n��i)�� |
| ROS���A(ch��)�c�\(y��n)��(d��ng)�W(xu��) | ROS���A(ch��)�n�� |
| ROS��(chu��ng)�������(xi��ng)Ŀ | |
| �Զ��x��Ϣ | |
| ServerͨӍ | |
| �C(j��)е��URDFģ�� | |
| �C(j��)��\(y��n)��(d��ng)�W(xu��)������ | |
| MoveIt���� | |
| ���ܴ��п�����C(j��) | |
| PC��λ�C(j��)���� | |
| �C(j��)е���Զ��x�W(xu��)��(x��)��(d��ng)���M | |
| �C(j��)е���P(gu��n)��(ji��)���ȼ�ĩ���ˑB(t��i)���� | |
| �C(j��)е�۹����^(q��)���(n��i)ץȡ�����\(y��n) | |
| 6���ɶ����\(y��n)��(d��ng)�W(xu��)���� |
| ��(sh��)�(y��n)�n�� | �n�̃�(n��i)�� |
| Jetson nano GPIO�n�� | �pɫLED���� |
| ���z�y | |
| �^������� | |
| �p�|�_�P(gu��n)���I | |
| PCF8591ģ��(sh��)�D(zhu��n)�Q | |
| PS2�ٿv�U | |
| �|���_�P(gu��n)���� | |
| ֱ��늙C(j��)�L(f��ng)�� | |
| ���M(j��n)늙C(j��)�(q��)��(d��ng) | |
| ��������(sh��)�(y��n)�n�� | ģ�M���������� |
| ģ�M�ضȂ����� | |
| �����(b��o)�� | |
| ���F������ | |
| �������������x�z�y | |
| ���D(zhu��n)���a�� | |
| �t������� | |
| BMP180�≺������ | |
| MPU6050���݃x���ٶȂ����� | |
| ѭ�E������ |
| ��(sh��)�(y��n)�n�� | �n�̃�(n��i)�� |
| �C(j��)е�ۻ��A(ch��)�n�� | �Ñ����I���� |
| ���Q�����ƌ�(sh��)�(y��n) | |
| OLED���ƌ�(sh��)�(y��n) | |
| ���Ɔ�(g��)��C(j��) | |
| ͬ�r(sh��)����6��(g��)��C(j��)��(d��ng)�� | |
| �xȡ��C(j��)��(d��ng)ǰλ�� | |
| �C(j��)��P(gu��n)��(ji��)��(bi��o)����(sh��)�` | |
| �C(j��)е���P(gu��n)��(ji��)���ȼ�ĩ���ˑB(t��i)���� | |
| �C(j��)е���赸���� | |
| �C(j��)е�۰��\(y��n)ɫ�K��(sh��)�` | |
| �C(j��)е�۰��\(y��n)�a��ɫ�K��(sh��)�` | |
| �C(j��)е��ץȡ�����^(q��)����c(di��n)��(bi��o)�� | |
| �C(j��)е��ץȡ�����^(q��)����K�yԇ |
| ��(sh��)�(y��n)�n�� | �n�̃�(n��i)�� |
| AIҕ�X�_�l(f��)�n�� | ���b��ʹ��Matplotlib��Pyplot �� Numpy |
| ��OpenCV���\(y��n)�Дz���^ | |
| JetCam���МyԇUSB�z���^ | |
| OpenCV�xȡ��������@ʾ�D�� | |
| OpenCV�xȡ���@ʾ�ͱ���ҕ�l | |
| OpenCV�L�D����(sh��)ʹ�� | |
| OpenCV�D���|(zh��)�������ز��� | |
| OpenCV�DƬ���� | |
| OpenCV�DƬƽ�� | |
| OpenCV�DƬ�R�� | |
| OpenCV����׃�Q | |
| OpenCV�DƬ�s�� | |
| OpenCV�DƬ���D(zhu��n) | |
| OpenCV�DƬ̎�� | |
| OpenCV�Ҷ�̎�� | |
| OpenCV�D������ | |
| OpenCV߅���z�y | |
| OpenCV��ֵ��̎�� | |
| OpenCV���ΈA���L�� | |
| OpenCV���ֈDƬ̎�� | |
| OpenCV�����L�� | |
| OpenCV��ɫ�DƬֱ���D | |
| OpenCVֱ���D���⮋ | |
| OpenCV�DƬ���a(b��) | |
| OpenCV��������(qi��ng) | |
| OpenCV��˹��ֵ�V�� | |
| OpenCVĥƤ���� | |
| OpenCV��ֵ�V�� | |
| AIҕ�X�c�C(j��)е�۾C���n�� | �ɫ�z�y |
| Ę�����۾��z�y | |
| ���˙z�y | |
| ��܇�z�y | |
| ܇�ƙz�y | |
| Ŀ��(bi��o)ۙ | |
| ����w��(sh��)�r(sh��)� | |
| �z���^�C(j��)е�����wۙ | |
| �z���^�C(j��)е����Ęۙ | |
| ɫ�Kץȡ�֒���(sh��)�(y��n) | |
| �z���^ArucoTag�R(sh��)�eץȡ��(sh��)�(y��n) | |
| AI�˹����ܙC(j��)е���c���˻���(d��ng)��(sh��)�` | |
| AI�˹����ܙC(j��)е���ք��R(sh��)�eץȡָ��ɫ�K�M(j��n)�дa�� | |
| AI�˹����ܙC(j��)е���������(sh��)�` | |
| Ƕ��ʽҕ�X��(y��ng)�� | �D���� |
| ���w�z�y | |
| �Z�x�ָ� | |
| Ŀ��(bi��o)�z�y | |
| ���w�ˑB(t��i)��(d��ng)���R(sh��)�e | |
| �����Ƴ� | |
| ������ȈD |
| ��(sh��)�(y��n)�n�� | �n�̃�(n��i)�� |
| AI �X�I(l��ng)��ǰ���㷨 | �B�ӕr(sh��)����ģ�� |
| Attentionģ�� | |
| ����HMM���Z���R(sh��)�e | |
| Transformer | |
| AI �X�C�ό�(sh��)��(zh��n) | AI �X�I(l��ng)��ǰ���㷨 |
| �ھ��Z���ϳ� | |
| �Z�� ����ʽ | |
| �D�`�C(j��)���� | |
| AIUI | |
| VAD���c(di��n)�z�y | |
| Сޱ�C(j��)�����Z��Ԓ | |
| Snowboy�Z���� | |
| �Z������R(sh��)�e | |
| ���� Kaldi ���Z���R(sh��)�e��(sh��)�` |